Sismografo a pendolo
15/01/2025
Progettazione e costruzione di un SISMOGRAFO amatoriale
Da anni sono appassionato di sismologia, soprattutto perché il Friuli Venezia Giulia è una zona sismica e ho vissuto di persona il terremoto del 6 Maggio 1976.
In passato ho costruito diversi sismografi, inizialmente rudimentali e in seguito sempre più precisi e affidabili.
Quello che presento è l’ultima versione dei miei strumenti e sta funzionando da tre mesi rilevando anche sismi extraeuropei. Considerata la relativa semplicità costruttiva vorrei condividerlo con altri appassionati auto costruttori.
Come funziona un sismografo:
Le onde sismiche generate da un terremoto hanno precise caratteristiche e uno strumento idoneo a rilevarle deve avere precisi requisiti.
Iniziamo con spiegare come sono fatte le onde sismiche:
Contrariamente ai luoghi comuni, esse non sono delle banali vibrazioni, bensì onde di bassa frequenza e soprattutto quelle generate da sismi molto lontani, di limitatissima ampiezza. Lo strumento dev’essere in grado di discriminare tra vibrazioni dovute al traffico o rumori ambientali dalle reali onde telluriche.
Le frequenze tipiche sono comprese tra 0.5 Hertz e 0.05 Hertz, che corrispondono a periodi che vanno dai 2 secondi ai 20 secondi, per questo motivo il sensore deve essere progettato per rilevare solo questo range di oscillazioni. L’ideale sarebbe il classico pendolo, che però dovrebbe essere lungo almeno 30/40 metri per rientrare nella necessaria risonanza. Visto che un simile pendolo sarebbe piuttosto ingombrante e scomodo da gestire, si può ricorrere ad un altro tipo di pendolo: quello orizzontale, conosciuto anche come pendolo di Lehman, che consiste in una struttura triangolare incernierata sull’asse verticale e una massa mobile alle estremità. In questo tipo di pendolo è possibile regolare la frequenza di risonanza semplicemente inclinando in modo opportuno l’asse verticale, arrivando anche all’equivalente di un pendolo tradizionale lungo 30 metri, con circa mezzo grado di inclinazione.
Il risultato è un sensore poco ingombrante e facilmente schermabile dalle correnti d’aria, cosa importantissima.
Ecco il mio:
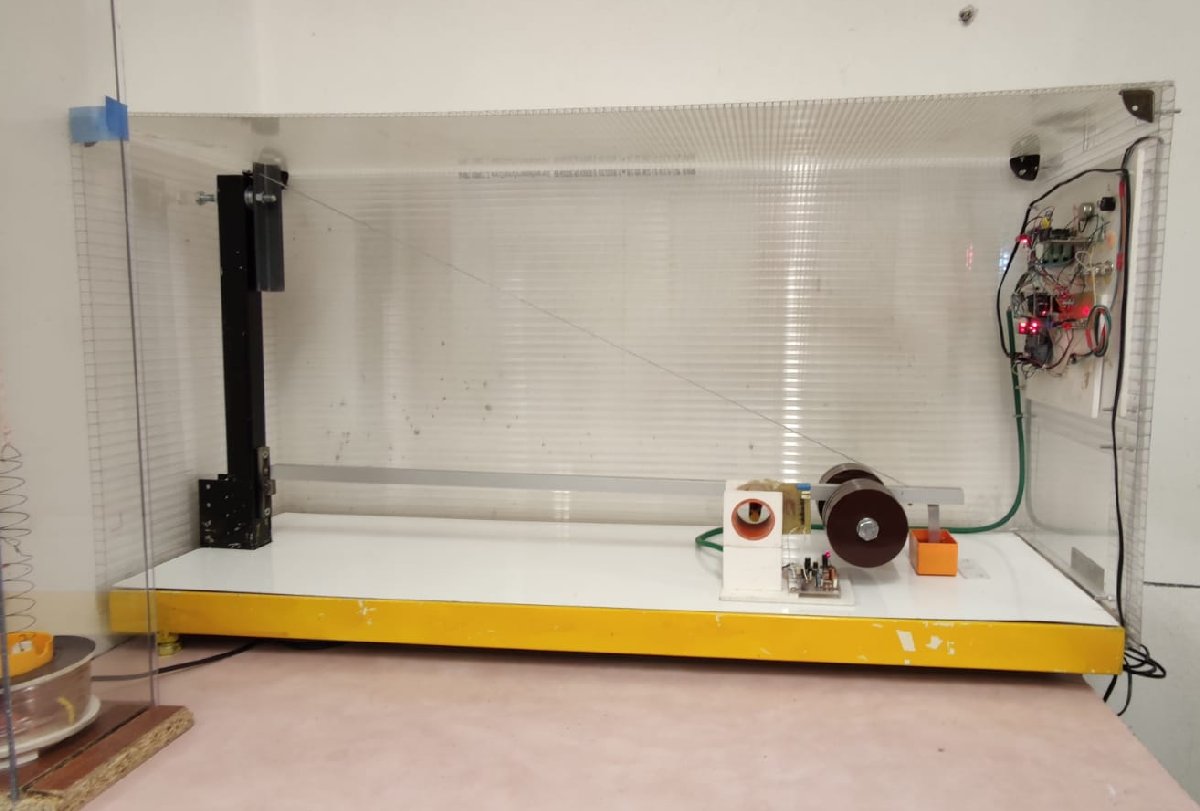
E’ realizzato con un telaio in tubolare di acciaio 30 x 30mm lungo 900mm e largo 300mm mentre il montante verticale è alto 400mm. Il tutto è saldato ad arco per ottenere una buona rigidità strutturale.
La base è sostenuta da tre piedini regolabili con vite di precisione a filettatura fine. L’asse verticale dev’essere inclinato in avanti di mezzo grado e per far questo basta regolare il piedino anteriore, dopo aver messo a bolla quelli posteriori. Vedremo poi come ottenere l’inclinazione corretta senza strumenti.
Il braccio mobile in alluminio è lungo 750mm ed è sostenuto dal cavetto trasversale in acciaio visibile in foto.
La massa mobile è composta da due serie di otto dischi in acciaio con diametro 80mm e spessore totale 48mm.
Possono essere sostituiti con dei pesi in piombo del peso di circa 2/2.5 Kg.
Il braccio mobile è vincolato per gravità al braccio verticale, appoggiato ad un coltello in acciaio duro alla corrispondente sede fissa. Non ci sono cerniere di alcun genere.
Taratura meccanica: Il pendolo così assemblato ha una risonanza di 0,083 Hz e per ottenerla basta regolare l’inclinazione svitando il piedino anteriore fino a quando il pendolo fa un’oscillazione completa in 10 secondi. In realtà questa non è una misura critica, è sufficiente approssimare tra i 5 e i 15 secondi. L’importante è sapere che con una risonanza più alta lo strumento è più sensibile ai sismi generati a breve distanza, mentre con una risonanza più bassa potremo migliorare la sensibilità ai sismi con epicentro a lunga distanza.
Una caratteristica di questo sismografo è di essere maggiormente sensibile alle onde laterali, ecco perché le stazioni professionali sono dotate di almeno due strumenti installati con un angolo di 90 gradi.
Perché serve un ampio range di frequenza?
Vediamo dunque come interpretare le onde sismiche.
Le onde generate da un terremoto viaggiano sulla crosta terrestre in più modi: in parte superficialmente e in parte penetrando nei vari strati della massa terrestre.
In base alle diverse densità rocciose incontrate dalle onde, queste possono assumere velocità diverse.
La terra assomiglia ad una cipolla, con strati composti da vari materiali e consistenze: Quella più esterna, che ben conosciamo, è definita “crosta terrestre” ed ha uno spessore medio di 30/40 km. Subito sotto troviamo la Litosfera che arriva fino ai 1300Km di profondità. Sotto di questa troviamo il mantello formato da rocce fuse (magma).
Un sisma genera principalmente due tipi di onde: le onde di VOLUME e e le onde SUPERFICIALI.
Le più veloci attraversano la zona del mantello e dunque sono le prime ad arrivare al sismografo, sono chiamate onde P e caratterizzate da una frequenza relativamente alta e da una ampiezza relativamente bassa.
Le onde successive sono chiamate S, sono circa del 70% più lente delle onde P, viaggiano in una zona più profonda del pianeta e hanno una frequenza più bassa ma un’ampiezza maggiore.
Analizzando il tracciato del sisma è possibile stabilire la distanza in cui si è verificato.
A titolo di esempio: se la distanza tra l’inizio delle onde P e quelle S fosse di 120 secondi, possiamo sapere che l’epicentro era distante 1000 Km, se invece il tempo fosse stato di 10 minuti la distanza era di 8500 Km
Per stabilire la zona geografica dell’epicentro ci si basa sul riferimento temporale delle onde ricevute e proprio per questo tutte le stazioni sismografiche sono collegate in una rete internazionale.
Qui trovate maggiori dettagli:
https://it.wikipedia.org/wiki/Onde_sismiche
https://www.intrageo.it/geofisica/epicentro-di-un-terremoto-come-si-localizza/
x\
Torniamo al sismografo…
Premetto che questo sismografo non può quantificare direttamente la magnitudo del sisma, questo perché non abbiamo il riferimento sull’energia liberata, della distanza e posizione dell’epicentro e ipocentro (profondità nella quale si è verificato). Per ottenere una stima precisa è indispensabile triangolare ed interpretare i dati ottenuti da una rete sismometrica diffusa, come quella gestita in Italia dall’Istituto Nazionale di Geofisica e Vulcanologia : www.ingv.it.
Ma anche a livello individuale possiamo ottenere qualche interessante risultato.
Abbiamo un pendolo in grado di “sintonizzarsi” sulle onde sismiche, ora dobbiamo trovare il modo di quantificarle con precisione e memorizzarle per la successiva analisi.
Ci serve dunque un sensore in grado di rilevare i piccolissimi (o grandi) movimenti laterali del pendolo, filtrare i risultati per escludere disturbi di varie origini ed archiviarli da qualche parte.
I miei primi sismografi erano basati su una bobina con all’interno un magnete sospeso in grado di muoversi lateralmente, il magnete generava un campo elettromagnetico e la bobina generava una FEM sinusoidale che adeguatamente amplificata poteva essere gestita da un datalogger. In realtà il sistema misurava solo la VELOCITA’ di spostamento del magnete avviato da una presunta scossa sismica. Creava perciò un semplice tracciato sinusoidale ma non informava sulla frequenza e il tipo di onda.
Per ottenere questi dettagli serve un sensore più sofisticato.
Ho pensato di realizzare un oscillatore LC costituito da una induttanza e capacità, costituito da una bobina attraversata da un nucleo ferromagnetico.
In posizione di riposo (nucleo al centro della bobina) si genera una certa frequenza, spostandosi internamente o esternamente la frequenza diminuirà o aumenterà proporzionalmente.
Nel mio prototipo l’oscillatore ha una frequenza centrale di circa 30KHz. Uno spostamento del nucleo di 1 mm varia la frequenza di circa 500 Hz, dunque possiamo discriminare spostamenti infinitesimali.
Questo metodo ha i suoi limiti, l’oscillatore LC è per sua caratteristica nativa piuttosto instabile e basta anche un cambiamento della temperatura per spostare la frequenza. Però è semplice e poco costoso, sufficientemente affidabile per un progetto amatoriale.
La prossima generazione di sismografi che costruirò sarà dotata di un sensore LVDT che utilizza sempre un nucleo ferromagnetico mobile ma con stabilità decisamente migliorata.
Per il momento illustro il progetto attualmente funzionante, realizzato soprattutto per collaudare l’hardware del pendolo.
La bobina è costituita da 100 spire di rame smaltato su rocchetto diametro 30 mm, in parallelo alla bobina c’è un condensatore poliestere da 470 pF. Al suo interno si trova un nucleo in ferrite ricavato da una vecchia radio a onde medie e fissato all’asta mobile del pendolo. Un semplice circuito oscillatore a FET alimenta il circuito LC e lo amplifica per erogare un segnale TTL interpretabile da Arduino.
Ho scelto un Arduino UNO perché ne avevo diversi in laboratorio, nulla vieta di usare altri modelli.
La cablatura è fatta direttamente sul pannello fissato sulla parte anteriore dello sismografo, questo per comodità e per mettere in atto possibili modifiche, ricordo che il sistema è tutt’ora in fase di sviluppo.
Possiamo notare: lo slot del lettore di SD, alcuni pulsanti NA, di cui per ora solo due sono usati (uno serve per il RESET e l’altro per la cancellazione della SD), un display LCD 2 righe 16 colonne retroilluminato, una strip a led WS2812 con 23 LED RGB, un cicalino piezo, un potenziometro per regolare la soglia di registrazione e due led per indicare lo stato. L’alimentazione è fornita da uno switching esterno da 12V 1 Ampere.
Questo è il retro del pannello dove possiamo osservare la board Arduino, un display LCD 16x2 retroilluminato, un Real Time Clock DS DS3231, un cicalino una basetta millefori che funge da HUB per le alimentazioni, vari altri componenti al momento non usati.
La bobina captatrice è formata su un tubo in plastica da 30mm di diametro e largo 40mm, sopra ci sono avvolte circa 60 spire di rame smaltato di spessore 0.35mm
Il condensatore è saldato direttamente sui terminali in uscita dalla bobina, che a loro volta sono collegati all’ingresso dello stadio oscillatore.
Quest’ultimo è un oscillatore libero, la cui frequenza dipende dall’impedenza della bobina e dalla capacità in parallelo.
Frequenza di risonanza (f₀) f₀ = 1 / (2π√(LC))
Fattore Q Q = 1/R × √(L/C)
Ho usato questo schema piuttosto classico ma costruito con i componenti che avevo in casa:
L’uscita dell’oscillatore va direttamente nel pin 5 di Arduino, non modificatelo perché la libreria usata prevede lo specifico timer interno. Anzi, direi che non ha senso modificare nessun pin.
Collegate poi le periferiche secondo questo schema:
-Lettore SD : MOSI>pin11 MISO>pin12 SCK>pin13 CS>pin4, collegare anche massa e positivo a 5V
-Scheda clock DS3231 : SDA>A5 SCL>A4, collegare anche massa e positivo a 5V
-LCD seriale 2 righe 16 colonne: SCL: SCL SDA: SDA, collegare anche massa e positivo a 5V
-Led rosso: + > pin 6, e negativo a massa
-Led verde: + > pin 7 e negativo a massa
-Cicalino piezo: > pin 3 e negativo a massa
-Pulsante Reset: > pin Reset arduino e l’altro a massa
-Pulsante Erase SD: > pin 1 e l’altro a massa
-Potenziometro 10K regolazione sensibilità: > centrale pin A2, laterali a +5V e a massa.
-Ingresso per frequenzimetro:> pin 5 (non modificare)
-Uscita per Led strip:> pinA1 oltre a +5V e massa.
Considerato che il circuito è stato realizzato con filatura, non credo ci sia la necessità di disegnare uno schema dettagliato. Alla fine avrete ottenuto qualcosa del genere, ma preciso che si tratta di una versione precedente a quella attuale:
Il software:
Il frequenzimetro usa la libreria FreqCount, disponibile liberamente in rete: da alcune verifiche mi sembra più affidabile del noto “pulseIn”.
Da questa frequenza di circa 30 KHz viene estrapolata dal software la posizione reale della ferrite vincolata al pendolo.
All’accensione viene effettuato automaticamente un azzeramento, in modo da stabilire la posizione centrale a prescindere dal disassamento della ferrite.
Se necessario (ad esempio se la frequenza cambia per deriva termica) si può effettuare un RESET in qualsiasi momento.
Vengono poi letti i valori di data/ora/minuti/secondi dall’orologio RCT, che ovviamente deve essere inizialmente impostato.
Prima del ciclo LOOP viene lanciata una diagnostica per i LED, il display LCD, il cicalino piezo, il lettore/scrittore di SD, la strip WS2812 in modo che tutto sia verificato.
Se la SD non è presente oppure guasta, il sistema non si avvia e avvisa con un allarme acustico.
La striscia a LED WS2812 viene illuminata con una doppia scansione completa e alla fine si accende il led centrale (verde). I led adiacenti vengono poi accesi di diversi colori in base alla posizione del pendolo, creando così un display immediato e coreografico.
In fase LOOP il software entra in modalità “attesa evento”: ogni decimo di secondo viene controllata da frequenza della bobina, confrontata se rientra nel limite impostato dal potenziometro e se il valore viene superato (se si verifica uno spostamento del pendolo), viene attivata la registrazione sulla scheda SD, completa di data e ora, nel frattempo il LED verde lampeggia durante la registrazione.
Contestualmente viene acceso il led rosso che indica la presenza di un evento registrato.
Tutto ciò che succede è visualizzato anche sul display LCD e sul monitor seriale (anche se la connessione al PC non è necessaria).
Un piccolo dettaglio: la vaschetta arancione che si vede nelle foto e il video, contiene olio per motore e serve per smorzare il movimento del pendolo, che altrimenti continuerebbe ad oscillare a lungo.
Lo strumento è talmente sensibile che anche un leggero alito di vento da muovere il pendolo, raccomando perciò di proteggere il pendolo con un cofano fatto con delle lastre di policarbonato trasparente.
Non meno importante: per ovvi motivi lo strumento deve essere installato a stretto contatto con la struttura edile che lo ospita, come un pavimento nudo o piastrellato o parete perimetrale in cemento armato. NON sono idonei scaffalature, mobili, tavoli, mensole, moquette, parquè ecc.
Prossimi sviluppi e miglioramenti:
Sto progettando una sensore basato sul chip AD598AD con tecnologia LVDT, ideato appositamente per il rilevamento micrometrico dello spostamento di una barra ferromagnetica. Questo dovrebbe migliorare la precisione e l’affidabilità delle letture.
Vorrei inoltre connettere tramite WiFi il sismografo alla rete, in modo da condividere i dati rilevati dalla mia stazione sismografica.
Se qualcuno è interessato all’argomento mi scriva pure.
Qui troverete un video del sismografo in funzione:
https://youtu.be/PlR90Yp6huY?si=HFDFXz0PSMFUK-wz
Il programma per Arduino UNO: